无人机作为一种广泛应用于各个领域的飞行器,主要有三种飞行模式,分别是GPS模式、姿态模式和手动模式。这些飞行模式提供了不同的控制方式和飞行特性,使得无人机能够在不同任务和环境中灵活应用。
一、GPS模式
GPS模式是目前无人机最常用的飞行模式之一。在GPS模式下,无人机会通过GPS和其他定位技术来定位、导航和保持飞行位置。这种模式适用于需要稳定飞行和保持特定位置,且信号稳定的任务场景中。在GPS模式下,无人机具备自动悬停的能力,能够精确地停留在空中的某一位置,不受风速和风向的影响。此外,无人机还能实现预设航点飞行和返回起点等功能。操作员只需事先设定好航点或任务,无人机就能按照设定的路径进行飞行,大大降低了操控的难度。
二、姿态模式
在姿态模式下,无人机不会自动稳定飞行位置,而是主要由操作员来控制。无人机会根据操作员输入的控制信号来实现各种动作和飞行姿态,比如滚转、俯仰、偏航等。姿态模式适用于需要更灵活操控和执行复杂动作的任务,比如特技飞行、竞速等。通过操纵遥控器,操作员可以实现无人机的各种精准动作,提升飞行的灵活性和操控的精准性。因而,相对于GPS模式,姿态模式对操作员的要求更高。
三、手动模式
在手动模式下,无人机完全由操作员控制飞行,没有辅助稳定系统的支持。操作员需要手动控制每一个动作和飞行姿态,并始终保持对无人机的掌控。手动模式通常是为了专业的飞行员或飞行控制员进行特殊操作或测试使用。相较于其他两种模式,手动模式对操作员的驾驶技术和飞行经验要求更高。只有经过充分的训练和实践,操作员才能熟练地掌握无人机的飞行,并在需要的时候快速作出反应。
事实上,在实际应用中,不同的飞行模式往往会结合使用,以满足不同任务的需求。例如,在无人机执行航拍任务时,可以先使用GPS模式预设航点,保证实现规划好的拍摄路径;然后转换到姿态模式,通过操纵遥控器来调整无人机的角度和位置,获取特定角度和视角的拍摄效果。




免费预约演示
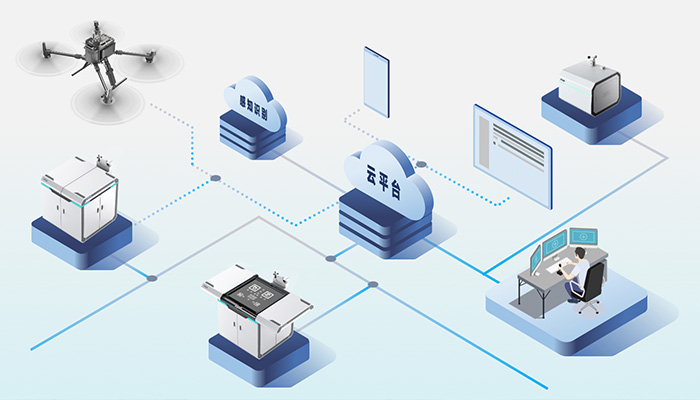
 全自动飞行任务选择与执行
自动机场的操控与监控
自动飞行任务下的数据采集
无人机自动回库后进行充电或换电
自动巡查任务的回放,图像数据的查阅
全自动飞行任务选择与执行
自动机场的操控与监控
自动飞行任务下的数据采集
无人机自动回库后进行充电或换电
自动巡查任务的回放,图像数据的查阅
添加官方客服

我们的工作时间是工作日9:00~17:30
期待与您沟通并提供您所需的支持或方案,谢谢!

 行业方案与产品报价
相关场景案例资料
威斯尼斯人wns2299cn官网版自动飞行系统功能
灵活的商务合作模式
行业方案与产品报价
相关场景案例资料
威斯尼斯人wns2299cn官网版自动飞行系统功能
灵活的商务合作模式
行业方案与产品报价
相关场景案例资料
威斯尼斯人wns2299cn官网版自动飞行系统功能
灵活的商务合作模式
行业方案与产品报价
相关场景案例资料
威斯尼斯人wns2299cn官网版自动飞行系统功能
灵活的商务合作模式

威斯尼斯人wns2299cn官网版是业内领先的无人机全自动飞行系统研发和服务商,用高度智能的自动飞行系统满足政企用户低空巡查业务需求,分布式部署的无人机机场,让巡逻干预随时可达,巡检数据触手可及。
投资邮箱:invest@foiadrone.com
媒体合作:BD@foiadrone.com



微信客服
周一至周五:9:00-17:30

扫码关注